PhotoCatch | Déclenchement Automatisé D’un Appareil Photo D90 à Partir D’un Capteur De Mouvements Et D’un Arduino
Dans mon dernier post, je parlais de notre réalisation lors du FabLab à savoir :
Un appareil photo avec déclenchement automatisé via un capteur de mouvement et un arduino.
Aujourd’hui, je vais détailler le montage de cette réalisation.
Le matériel
1 2 3 4 5 6 7 8 | |
PhotoCatch – Etape par étape

Achat de la télécommande
- La première étape consiste à acheter une télécommande qui va piloter le déclenchement de l’appareil photo. Celle ci suffit amplement : http://quent.in/Af9bg0
- Couper délicatement l’extrémité de la télécommande afin de ne pas détériorer les 3 fils qui se cachent sous la gaîne en plastique.
Parmis ces 3 fils, on trouve un fil blanc, jaune et rouge.
- Le contact du fil blanc (masse) et jaune permettent de faire l’autofocus.
- Le contact du fil blanc (masse) et du fil rouge permettent de déclencher la capture.
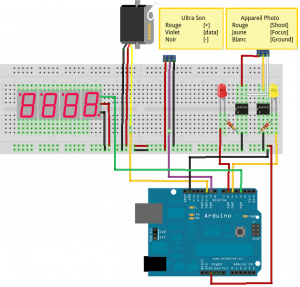
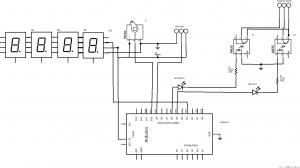
Schémas de montage
Réalisés sous Fritzing – http://fritzing.org
- 2 optocoupleurs pour contrôler le mécanisme de focus et de shoot (et d’isoler l’appareil photo du reste du circuit) ;
- 1 capteur ultrasons permettant de calculer la distance d’un obstacle (30° d’ouverture) ;
- 1 servomoteur permettant au capteur ultrasons de balayer un champ plus large (180°) ;
- 4 afficheurs 7 segments permettant de compter le nombre de photos prises.
Code arduino
Le code est disponible dans son intégralité sur GitHub : https://github.com/2xyo/fablab/blob/master/photocatch/src/photocatch.ino
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 | |
Démonstration par mon collègue Yohann Lepage (@2xyo)
Bonus – Timelapse de l’explor’Camp par PhotoCatch :
Evolution possible
- Utiliser « Picture Transfert Protocol » qui permet de contrôler beaucoup plus de paramètres tels que l’ouverture de l’objectif, la vitesse et même la récupération des photos. Tout cela par contrôle USB.